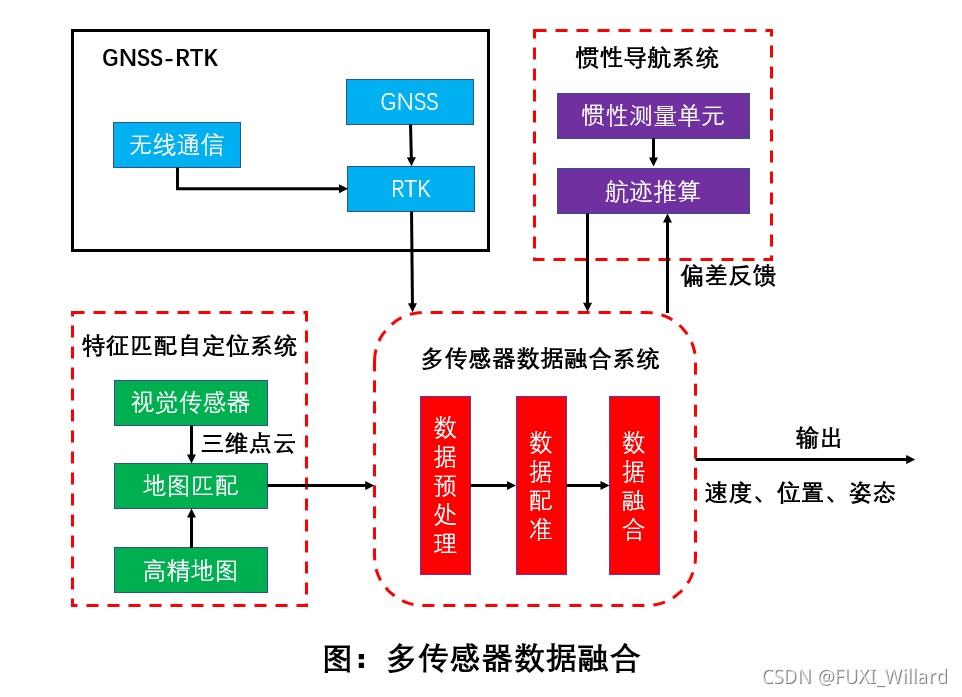
本文在基千激光雷达和惯性测量元件融合的定位与建图方案的基础上, 引入车辆底盘上的轮速传感器和方向盘转角传感器,提出了一种基千激光雷达、 惯性剽量元件 和车辆传感器的多传感器融合方案。本文的主要研究内容...
”自动驾驶 多传感器融合定位 传感器融合 融合算法 定位算法“ 的搜索结果
自动驾驶,机器人以及无人机领域中,常用的传感器以及融合方法和思路。内含最强自动驾驶学习资料的获取。
自动驾驶和机器人的多传感器融合定位算法基础-常用坐标系的介绍,内含自动驾驶最全学习资料。
激光SLAM之多传感器融合定位 , 工程化落地项目,涉及激光雷达+imu等多传感器融合定位,不仅仅是算法逻辑,里面还增加了工程应用角度的代码优化,配置解析文档也非常完整。 该商品与本人发布的“激光SLAM之激光雷达+...
多传感器融合定位技术
标签: 1024程序员节
多传感器融合算法-后融合
标签: 算法
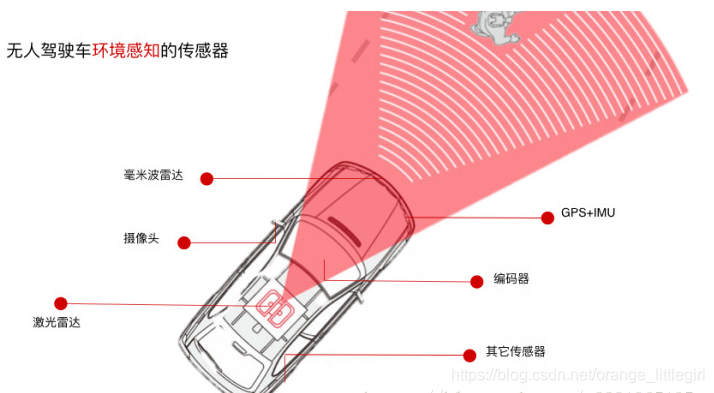
自动驾驶系统通常由定位、环境感知和规划控制等模块组成,近年来主流的环境感知传感器包括、超声波雷达等。不同种类传感器由于其探测原理不同,所具备的优劣势也有所差异,且现阶段单一种类的传感器往往很难覆盖所有...

1、传感器(Sensor)选取自动驾驶系统中用于状态估计(State Estimation)的常用传感器包括GPS/GNSS、IMU、激光雷达(Lidar)。状态估计(State Estimation)选用传感器需要考虑哪些因素:1)误差不相关性。也就是说,用于...
目前融合定位常用的方法主要分为两大块,一块是基于滤波的方法,另一块是基于图优化的方法。上一节已经介绍过基于滤波的方法,本节主要针对基于图优化的方法展开详细介绍。
“自动泊车、公路巡航控制和自动紧急制动等自动...只有把多个传感器信息融合起来,才是实现自动驾驶的关键。” 现在路面上的很多汽车,甚至是展厅内的很多新车,内部都配备有基于摄像头、雷达、超声波或LIDAR...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达导读高德定位业务包括云上定位和端上定位两大模块。其中,云上定位主要解决Wifi指纹库、AGPS定位、轨迹挖掘和聚类等问题;端上定位解...

导读 高德定位业务包括云上定位和端上定位两大模块。...特别是车机端定位,由于定位设备安装在车上,一方面,它可以搭载更丰富的定位传感器来解决特殊场景的问题,另一方面,各个传感器之间相互固连,有利于...
从零开始做自动驾驶定位(文章汇总)


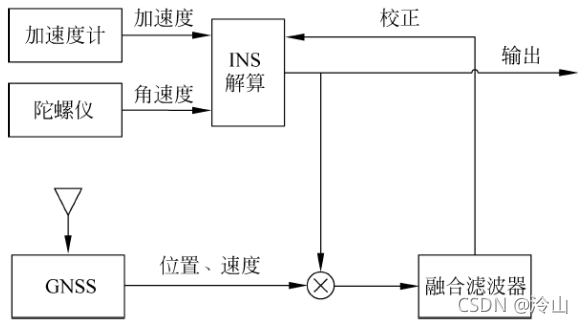
本文以误差状态卡尔曼滤波器(Error State Kalman Filter, ESKF)为滤波框架,对自动驾驶车辆的位置、速度和姿态信息进行状态估计,设计了 个多传感器融合的车辆里程计系统。系统以惯性测量单元(InertialMeasurement ...
来吧
作者|Alan 编辑|汽车人原文链接:https://zhuanlan.zhihu.com/p/430323552点击下方卡片,关注“自动驾驶之心”公众号ADAS...在自动驾驶汽车中,传感器融合是融合来自多个传感器数据的过程。该步骤在机器人技术中是强...



传感器是环境感知系统的核心,自动驾驶车辆通过其获取周围的环境信息。自动驾驶领域存在多源异构传感器,本文将为您介绍多传感器数据融合处理方法,以及雅名特自动驾驶aiSim仿真模拟平台的传感器模拟的主要功能。
LOAM系列算法配置及建图测试:LIO-SAM、LeGO、A-LOAM、LIO-mapping。参考AutoWare 或者 Apollo。4.融合GNSS、IMU的点云定位。5.融合Camera的点云定位。2.融合GNSS的点云定位。3.融合IMU的点云定位。1.纯激光雷达点云...
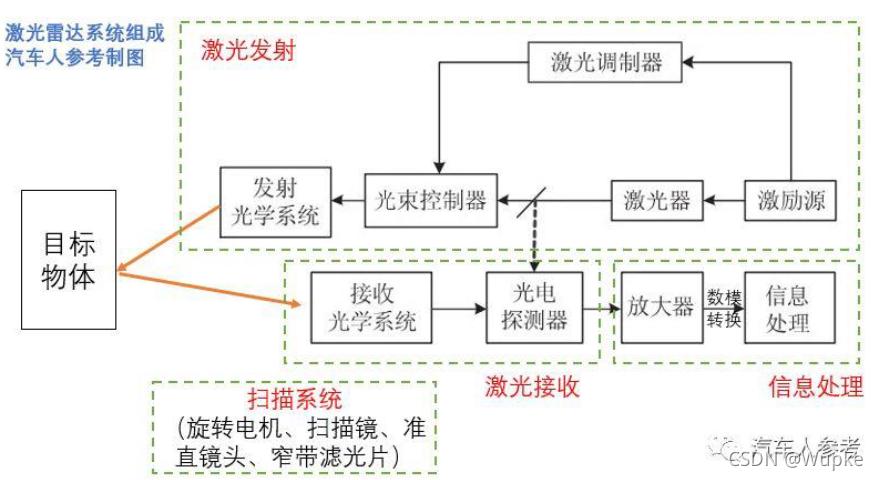
惯性传感器 工作原理 IMU特性 影响因素 应用 GNSS与RTK介绍 概述 应用 超声波雷达 概述 工作原理 超声波雷达类型 超声波雷达的优劣势 应用: 摄像头介绍 优势: 可以识别车辆周边的环境信息和纹...
推荐文章
- 阿里云企业邮箱的stmp服务器地址_阿里云stmp地址-程序员宅基地
- c++ 判断数学表达式有效性_高考数学大题如何"保分"?学霸教你六大绝招!...-程序员宅基地
- 处理office365登录出现服务器问题_o365登陆显示网络异常-程序员宅基地
- Nginx RTMP源码分析--ngx_rtmp_live_module源码分析之添加stream_ngx_rtmp_live_module 原理-程序员宅基地
- 基于Ansible+Python开发运维巡检工具_automation_inspector.tar.gz-程序员宅基地
- Linux Shell - if 语句和判断表达式_shell if elif-程序员宅基地
- python升序和降序排序_Python排序列表数组方法–通过示例解释升序和降序-程序员宅基地
- jenkins 构建前执行shell_Jenkins – 在构建之前执行脚本,然后让用户确认构建-程序员宅基地
- 如何完全卸载MySQL_mysql怎么卸载干净-程序员宅基地
- AndroidO Treble架构下HIDL服务查询过程_found dead hwbinder service-程序员宅基地